记得几年前我刚开始接触3D传感项目时,曾天真地以为只要传感器够贵,成像效果就一定好。直到在实验室里熬了几个通宵,发现无论怎么调试算法,那张深度图的边缘总是有噪点,我才深刻意识到:如果没有优质的“光”作为探针,再好的“眼”也是盲的。 ToF(Time of Flight,飞行时间)技术的核心,其实在于那颗不起眼的泛光LED。
很多工程师朋友在选型时容易忽略光源设计的细节,导致成品在强光下失效或者精度不达标。作为在恒彩电子见证了无数次封装测试的小编,今天我就想和大家聊透这件事——如何通过优秀的泛光LED设计,让你的ToF深度相机性能起飞。
泛光LED设计核心要点速览
纳秒级响应速度:ToF依赖时间差计算距离,LED的上升和下降时间必须极短,通常在纳秒级别,以确保脉冲波形的精准度。
高辐射功率密度:为了提升信噪比(SNR),特别是在远距离探测时,LED需要在瞬间爆发出极高的光能量。
视场角(FOV)匹配:光源的照射范围必须与相机镜头的视场角完美匹配,避免能量浪费或边缘暗角。
波长稳定性:温漂会导致波长偏移,进而影响滤光片的透过率,必须通过优秀的封装散热来控制。
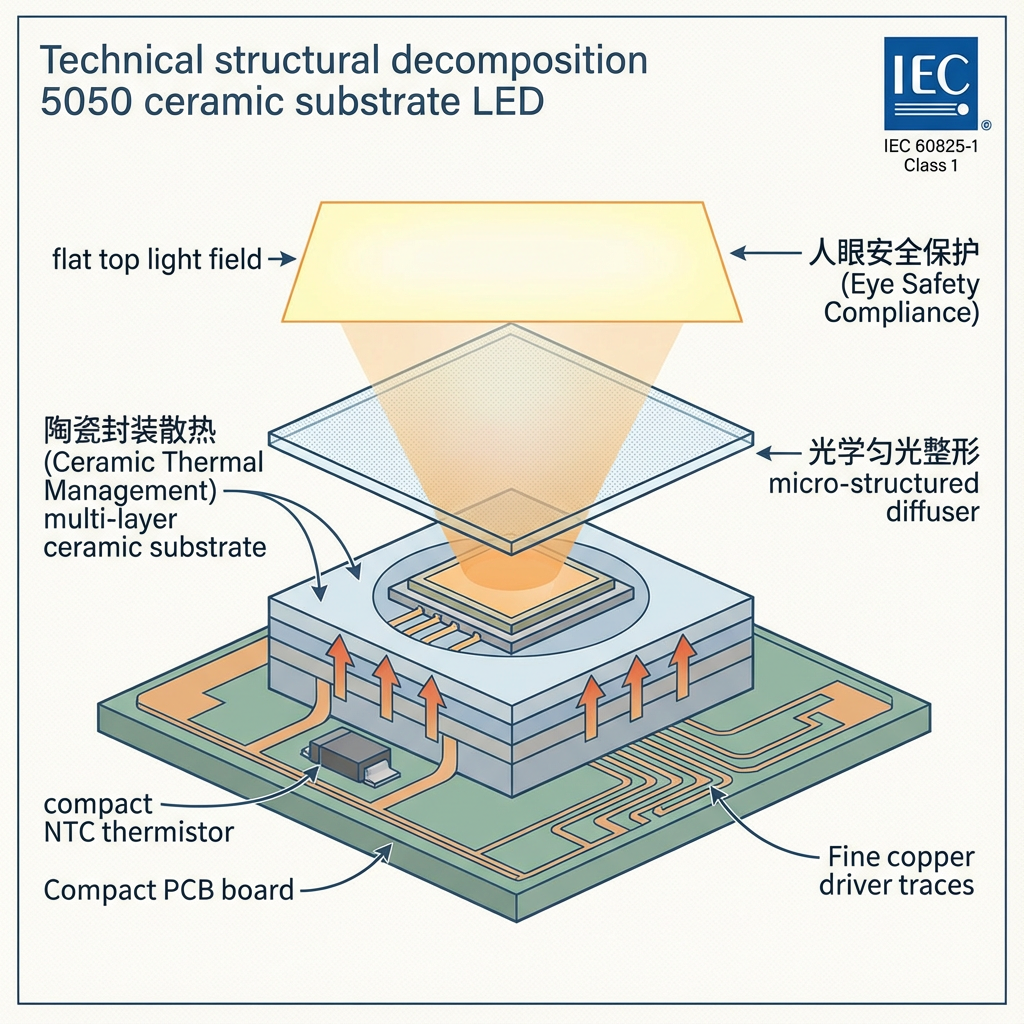
人眼安全合规:高功率红外光虽不可见但可能伤眼,设计必须符合IEC 60825-1等光生物安全标准。
核心解析:泛光LED在ToF深度相机中的决定性作用
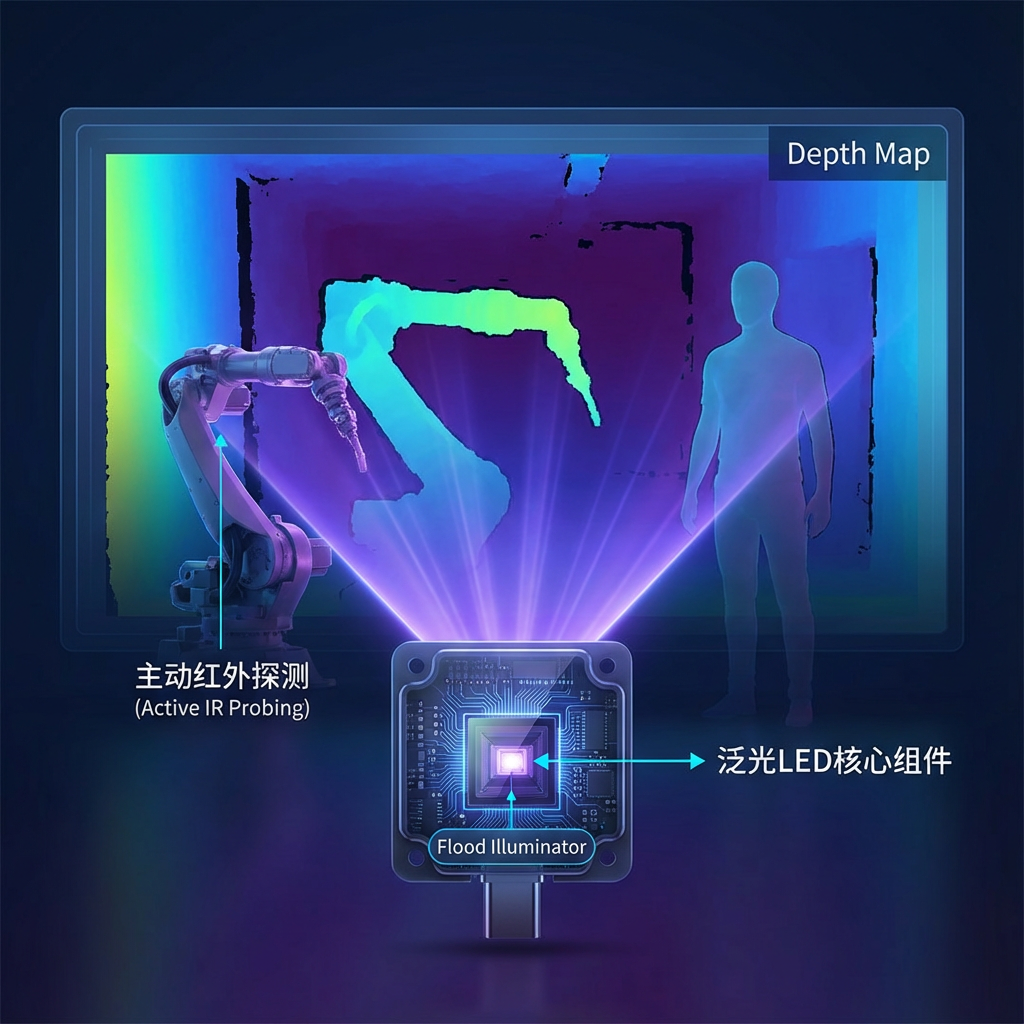
如果你把ToF深度相机比作蝙蝠,那么泛光LED(Flood Illuminator)就是它发出的“超声波”。只是这里用的不是声音,而是光子。泛光LED的主要职责是向视场内发射均匀的、经过调制的红外光脉冲。 当这些光子碰到物体反射回来被传感器接收时,系统就能算出距离。
这里有一个常见的误区:很多人认为只要灯够亮就行。其实,ToF系统对光源的要求远不止“亮度”。它更看重的是“光的质量”。这就像是用一把尺子去量东西,如果尺子的刻度(光脉冲)本身就是模糊或者抖动的,你怎么可能量得准?
泛光照明与我们在结构光中看到的点阵投影(Dot Projector)不同。点阵投影需要打出特定的图案,而泛光照明要求的是全视场内的均匀覆盖。如果LED光源的均匀性不好,就会导致画面中心测距准确,而四周全是噪点,这在工业避障或人脸识别中是致命的。
行业专家指出:ToF相机的深度测量精度直接受制于发射端的光功率密度和调制频率。一个设计优良的LED光源,能将深度感知的误差率压低至1%以下。
在实际应用中,我们发现优秀的LED设计还能显著提升相机的“抗干扰能力”。比如在户外强阳光下,环境光中的红外成分会淹没信号。这时,只有更高功率密度、波长更纯净的LED光源,才能像穿透迷雾的探照灯一样,把有效的信号送回传感器。
ToF(飞行时间)成像原理与光源同步机制
要搞懂LED怎么设计,我们得先复习一下初中物理——哦不,是tof深度相机原理。简单来说,ToF分为两种:iToF(间接飞行时间)和dToF(直接飞行时间)。它们对LED光源的“脾气”要求截然不同。
dToF比较直接,它计算光子飞个来回的时间。这要求LED必须能发射出非常窄、非常陡峭的脉冲波。就像百米赛跑的发令枪,响声必须干脆利落,不能有回音。如果LED有“拖尾”现象(关断后还有余辉),传感器就会误判,导致测量数据一塌糊涂。
而iToF则是通过发射连续的调制波(通常是正弦波或方波),检测发射波和反射波之间的“相位差”。
这里是光源设计的最大难点:同步。
LED的每一次闪烁,都必须和传感器的快门严丝合缝地配合。这不仅考验驱动电路,更考验LED本身的物理特性。在恒彩电子的实验室里,我们测试过很多普通LED,在高频调制(比如100MHz)下,它们的光波形会严重畸变,原本方形的波变成了馒头形,这就导致了解调出的深度数据失真。
数据显示:使用高精度LED光源并配合优化的驱动电路,可以将ToF相机的深度感知误差从传统的2-3%降低至1%以下,这对于精密工业测量至关重要。
为了解决这个问题,我们需要LED芯片具备极低的结电容,同时封装线路的电感也要降到最低。每一个纳秒的延迟,在光速的世界里,都意味着几十厘米的误差。所以,别小看那一颗小小的灯珠,它的内部结构是为了“追赶光速”而设计的。
泛光LED设计的关键技术参数详解
做产品选型时,面对规格书上一堆参数头都大了?别慌,盯着这三个核心参数看,基本就不会踩坑。
1. 波长选择:850nm 还是 940nm?
这是最先要做的选择题。
850nm:在这个波段,图像传感器的量子效率(QE)较高,也就是说感光更灵敏。如果你是在室内用,或者对功耗很敏感,选850nm没错。虽然它会有轻微的红爆(人眼能看到一点红光),但在暗光环境下效果最好。
940nm:这个波段是户外神器。因为太阳光在940nm处的能量被大气层吸收了很多,背景噪声低。虽然传感器的感光效率会下降,但信噪比反而更高。如果你的产品要卖到户外,或者为了美观完全不想让人看到红光,940nm是首选。
2. 视场角(FOV)与功率密度的博弈
很多人想要大广角,又想要照得远,这在物理上是矛盾的。LED发出的总能量是有限的,FOV越大,分摊到单位面积上的能量就越少,探测距离就越短。这就需要做“光形设计”。通过透镜或扩散片,把光“捏”成你想要的形状。比如,有些ToF相机是长方形视野(4:3),那你就不能用圆形的圆形光斑,否则上下浪费能量,左右又照不到。
3. 峰值功率与占空比
ToF工作时,LED是像机关枪一样快速闪烁的。我们不仅要看它的持续功率,更要看它的脉冲峰值功率。有些LED平时看着不亮,但能在短时间内承受几安培的电流冲击,爆发出几瓦的光功率,这才是ToF需要的“爆发力”。
| 参数 | 850nm LED | 940nm LED | 选型建议 |
|---|---|---|---|
| 红爆现象 | 微弱可见 | 不可见 | 隐蔽性要求高选940nm |
| 传感器效率 | 高 (~40-60%) | 低 (~20-40%) | 追求低功耗选850nm |
| 抗阳光干扰 | 一般 | 优秀 | 户外应用必选940nm |
| 典型应用 | 扫地机、室内安防 | Face ID、车载手势识别 | 根据场景决定 |

决定性能的硬件要素:封装技术与光学材料
前面说了那么多原理,最后落地的关键还在于“封装”。作为恒彩电子的老本行,我们深知封装材料对ToF LED寿命和性能的影响是决定性的。
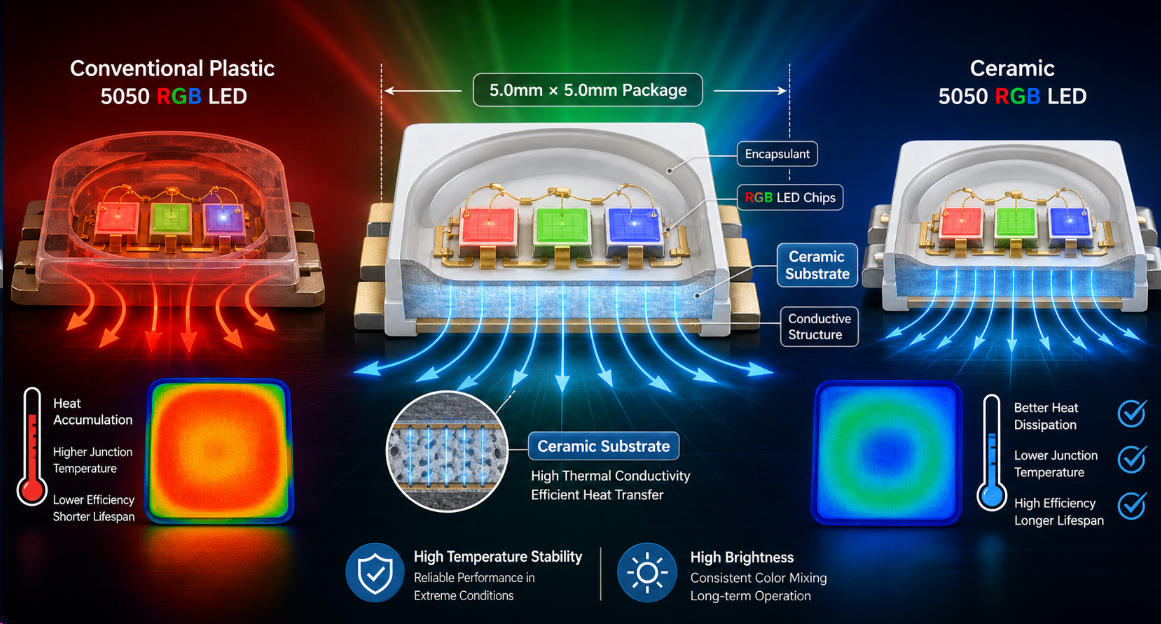
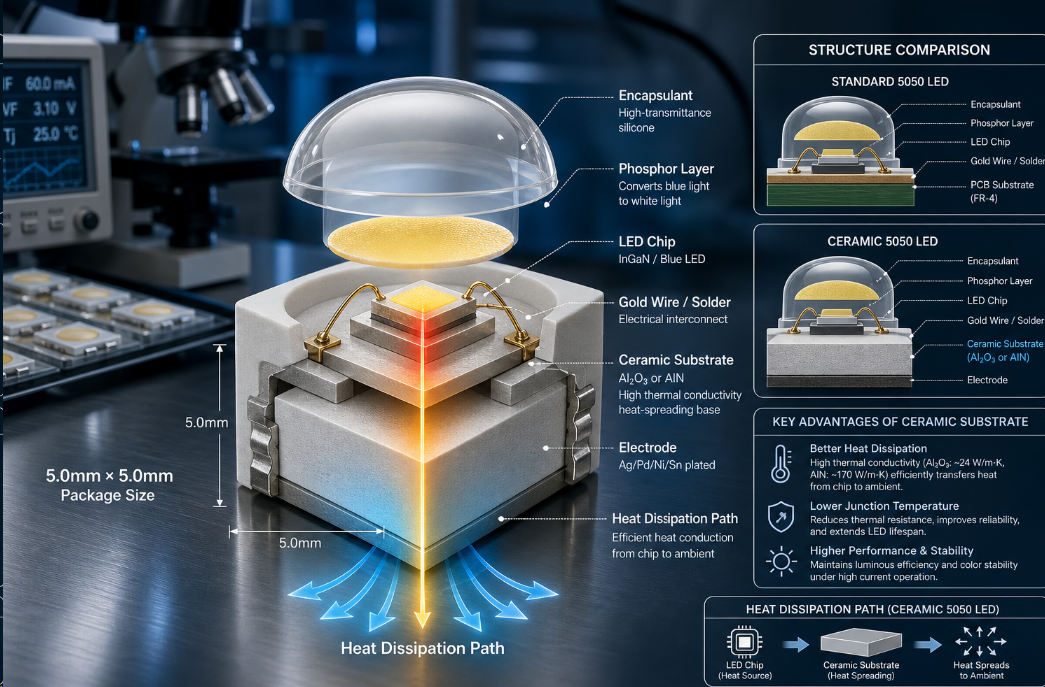
传统的PPA支架在ToF的高功率脉冲下,很容易老化发黄,导致光衰。现在高端的ToF方案,基本都转向了陶瓷基板或EMC封装。
为什么是陶瓷?因为ToF LED工作时瞬间热量巨大。陶瓷基板的热导率极高,能把芯片产生的热量瞬间导出去,保证芯片结温不过高。一旦结温升高,不仅光功率会下降,波长还会发生“红移”(向长波方向漂移)。如果你用的是窄带滤光片,波长一漂,光就被挡在外面了,相机直接“失明”。
这也是为什么我们强烈推荐在严苛环境中使用陶瓷封装产品,比如我们的5050陶瓷灯珠列表中展示的系列,它们专为高功率、高可靠性场景设计,非常适合作为ToF系统的核心光源载体。
光学整形:Diffuser(匀光片)的艺术光有好的灯珠还不够,原本LED发出的光是高斯分布的(中间亮,四周暗)。我们需要加一片Diffuser,把光“打散”并重新均匀分布。现在的Diffuser技术已经非常先进,甚至可以实现“平顶光场”(Flat Top),也就是整个视野内亮度几乎一致。这对于后端的深度计算算法来说,简直是福音,大大减少了因光强不均带来的计算补偿压力。
此外,芯片的选择也是一门学问。目前主流是VCSEL(垂直腔面发射激光器)和EEL(边发射激光器)。虽然VCSEL的光束质量更好,但高功率的LED(实际上是LED阵列)在成本和可靠性上依然有巨大优势,特别是在中短距离的泛光照明中。
解决ToF成像痛点:LED光源的工程优化策略
在实际的工程落地中,我们经常遇到各种“坑”。这里分享几个通过光源设计解决系统痛点的策略,希望能给你一些灵感。
1. 提升信噪比(SNR):光功率密度的极致压榨很多时候成像噪点多,根本原因是反射回来的光太弱了。除了增大电流,我们还可以通过减小发光角度来提升中心光强。如果你的应用场景只需要看清正前方30度,那就别选90度的LED,把能量集中起来,探测距离能翻倍。
2. 抑制多径干扰(Multipath Interference)这是一个很头疼的问题。光子在角落里反射好几次才回到相机,导致测出的距离比实际远。虽然主要靠算法消除,但光源也有责任。
Tip: 尽量提高光源的准直性,减少杂散光照射到非目标区域(如地板、天花板),可以从源头上减轻多径效应。
3. 温漂控制与波长补偿LED对温度非常敏感。温度每升高10度,光功率可能下降1-2%,波长漂移0.3nm左右。优秀的工程设计会在LED板上贴一颗NTC(热敏电阻),实时监测温度。然后通过驱动芯片动态调整电流:温度高了,就适当加大一点电流补偿亮度(在安全范围内),或者通知后端算法进行波长偏移的校正计算。
4. 驱动电路的PCB布局千万别忽略PCB设计!ToF驱动电流脉冲极快,PCB走线上的寄生电感会严重影响波形。
建议:驱动芯片要尽可能靠近LED灯珠。
建议:使用宽走线,减少回路面积。
建议:在电源引脚处放置高质量的高频电容。
泛光LED设计中的人眼安全与热管理规范
做产品,安全永远是第一位的。ToF相机发射的是红外光,人眼看不见,不会有躲避反射,如果功率过大,可能会视网膜造成不可逆的损伤。
光生物安全合规(IEC 60825-1 / IEC 62471)无论你的ToF性能多强,如果过不了Class 1激光安全标准,就不能上市。在设计泛光LED时,必须引入人眼保护机制。通常的做法是在模组上集成一个PD(光电二极管),实时监控发射出的光强。一旦检测到Diffuser脱落(导致激光束直接射出)或者驱动电路故障(导致长亮),电路必须在毫秒级内切断电源。
高频脉冲下的热管理ToF LED的热管理和普通照明完全不同。它面临的是瞬间的热冲击。
2023年的市场研究表明:超过40%的ToF模组失效归因于热管理不当导致的LED光衰或波长漂移。
除了前面提到的使用恒彩电子这类高导热的陶瓷基板外,PCB的热沉设计也至关重要。如果是金属芯PCB(MCPCB),效果最好。如果是普通FR4板,一定要打足够多的过孔(Vias)将热量导到背面的散热片上。记住,散热不仅仅是为了寿命,更是为了保证测量数据的“准”。
关于ToF深度相机LED设计的常见技术疑问
在与客户的交流中,有些问题被反复问到。我整理了一下,希望能直接解答你的疑惑。
Q1: 泛光LED和结构光用的VCSEL点阵有什么本质区别?泛光LED追求的是“面的覆盖”,提供背景光或ToF的测量光,要求能量均匀铺开;而结构光的点阵(Dot Projector)追求的是“点的锐利”,需要在空间中投射出数万个清晰的亮点。两者的光学整形器件和芯片结构完全不同。
Q2: 怎么判断我的泛光LED光源均匀性是否达标?工业级标准通常要求视场内的相对照度均匀性(Relative Illumination)大于70%甚至80%。你可以用光束分析仪测试,或者简单点,对着白墙拍一张红外灰度图,分析中心像素和边缘像素的灰度值差异。
Q3: LED驱动信号的上升/下降时间对精度影响大吗?非常大。对于dToF系统,如果上升时间(Rise Time)慢了1纳秒,意味着光脉冲的“起始点”模糊了,反映在距离上就是15厘米的误差!所以,选择低电感的LED封装和高速驱动器是必须的。
Q4: 为什么我的ToF相机刚开机准,过一会就不准了?这典型的“热漂移”现象。随着LED温度升高,波长发生了偏移,如果你的镜头前加了窄带滤光片(比如940nm±10nm),偏移后的光被滤光片挡住了,信噪比下降,导致测距不准。解决办法是加强散热或使用带宽稍宽的滤光片。
高标准LED设计如何定义ToF相机的最终表现
回顾全文,我们可以清晰地看到,泛光LED在ToF深度相机中绝不仅仅是一个“灯泡”那么简单。它是整个深度感知系统的主动探测触角。从波长的物理选择,到封装材料的散热考量,再到驱动电路的纳秒级控制,每一个环节的微小优化,最终都会汇聚成深度图上精度的提升。
对于工程师而言,在项目初期就确立正确的光学规格标准,选择像恒彩电子这样拥有近二十年封装经验、懂光学设计的合作伙伴,能帮你规避掉80%的硬件大坑。
未来的ToF市场,随着智能驾驶和人形机器人的爆发,对精度的要求只会越来越高。如果你正在开发相关的产品,请务必善待每一束光,因为在机器的眼里,光就是它们理解这个世界的语言。希望这篇文章能为你的设计之路点亮一盏灯!